<
Serge77 - Моя ракетная мастерская >Ракета Полюс
После испытаний магнитного датчика на ракете X-6A-1 осталось чувство неудовлетворённости, чего-то недоделанного. И ещё шесть двигателей МРД... После недолгих раздумий я решил сделать новую ракету с изменённой конструкцией датчика и системы разделения.
Цель проекта осталась прежней: испытать магнитный датчик апогея на относительно простой ракете перед тем, как установить его на Мрию.
Основные параметры ракеты:
длина 668 мм,
диаметр корпуса 41 мм,
двигатель МРД 20-10-4, вышибной заряд удалён,
система спасения: магнитный датчик апогея, система разделения и выброса парашюта на резиновом амортизаторе,
взлётный вес 194.2 г,
вес датчика 62.9 г
вес двигателя 39.6 г
Конструкция ракеты.
Магнитный датчик использован тот же, что летал на ракете X-6A-1, он не пострадал после падения. Узел нихрома изменён. На фото на правой панели виден нихром толщиной 0.2 мм и длиной 25 мм, он закреплён двумя винтами. Этот нихром несъёмный, при срабатывании датчика он не перегорает, а только накаляется, от него переплавляется леска. В верхней части этой панели установлен проволочный крючок, за который цепляется петелька из лески. В нижней части - светодиод, который загорается в момент включения питания устройства.
Светодиод подключён напрямую к батарее питания через сопротивление 1 КОм (на схеме впаяны параллельно два резистора по 2 КОм):
В разрез питающего провода будет установлена нефиксируемая кнопка, при нажатии на которую устройство будет включаться:
Кнопка устанавливается в головной части под переборкой из пресс-картона, при соединении головной части с корпусом кнопка упирается в переборку, вклеенную в корпусе, таким образом при сборке ракеты магнитный датчик автоматически включается, а при срабатывании и разделении частей автоматически отключается. Головная часть соединяется с корпусом короткой резинкой (в данном случае чёрная бельевая резинка). Концы резинки прочно закреплены - сначала примотаны тонкой капроновой ниткой на ПВА, затем заклеены ватманом:



Датчик установлен в головной части над переборкой. Напомню, что из-за того, что железный корпус батареи оказался очень близко от датчика, его нужно перекалибровать, т.е. изменить калибровочное сопротивление. Между батареей и датчиком установлена картонная прокладка толщиной 4 мм, при меньшем расстоянии настроить датчик с помощью калибровки уже не удавалось. Сверху датчика вся головная часть заполнена поролоном, обтекатель закреплён скотчем.

Парашют изготовлен по рецепту A_centaurus: нитки-стропы приклеены к плёнке скотчем по всей длине:

Парашют крепится напрямую к резинке, складывается и помещается в пространство между переборками в корпусе и головной части:

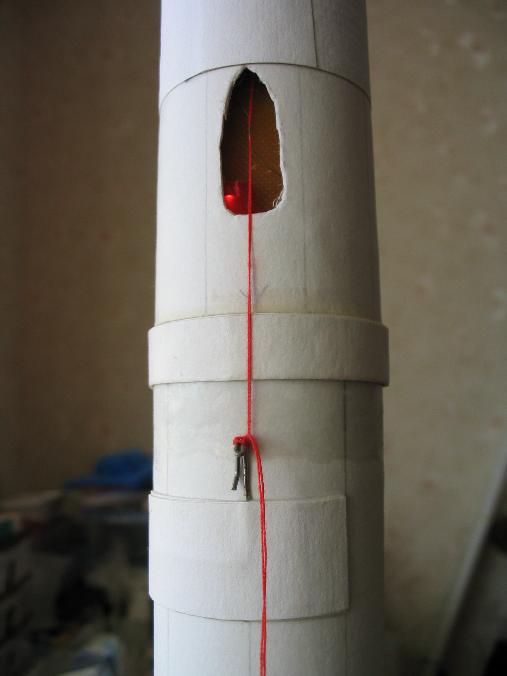
После этого головная часть устанавливается на место, при этом резинка сильно натягивается, а с обратной от резинки стороны части ракеты стягиваются леской, протянутой по нихрому (на фотографии показана красная нитка). Видно, что светодиод загорелся, ракета готова к полёту. При срабатывании датчика и пережигании лески головная часть сначала немного отходит под действием пружины кнопки, затем резинка "ломает" ракету, парашют выпадает и раскрывается. Таким образом, резинка выполняет две роли: это и механизм разделения, и амортизатор парашюта. Кнопка тоже выполняет две роли: включает датчик и участвует в разделении. Интересной особенностью этой системы разделения является то, что корпус ракеты остаётся практически пустым - между креплением двигателя и верхней переборкой ничего нет. Здесь можно установить аппаратуру.
На ракете установлены два винта с широкой шляпкой, места их крепления усилены тремя слоями ватмана на ПВА:

Шляпки винтов входят в пазы направляющей. Направляющая - это карниз для занавесей, алюминиевый профиль, диаметр 20 мм, длина 160 см:

Лётные испытания.
Ракета на старте. Направляющая закреплена хомутами за железный уголок 40х40, который вбит в землю. Получилась очень простая и очень устойчивая стартовая установка.

Леска натянута, датчик включён, ракета готова к старту:

Первый полёт прошёл безукоризненно, датчик сработал как раз в начале спуска, парашют раскрылся и ракета мягко приземлилась:

И второй полёт прошёл безукоризненно, и третий, и четвёртый... Эйфория несколько спала, запуски пошли на автомате - перезарядили - старт! Перезарядили - старт! И так, пока не закончились все шесть двигателей. Датчик всегда срабатывал вовремя, ни разу не было замечено никаких задержек. Из нескольких записей полёта я выбрал ту, где лучше всего виден момент срабатывания датчика. Видео, 731KВ, WMV9
Покадрово выброс парашюта выглядит так:
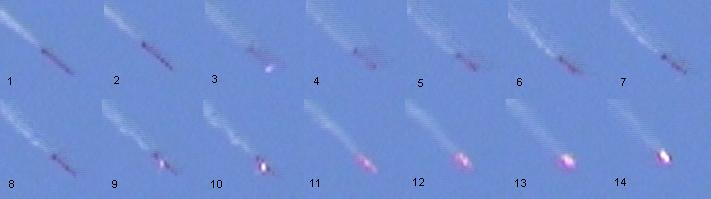
Кадры 1,2: ракета ещё целая.
Кадр 3: головная часть отделилась.
Кадры 4-8: ничего не происходит, ракета сохраняет ориентацию.
Кадры 9,10: начало раскрытия парашюта.
Кадр 11: парашют раскрыт, корпус ракеты за счёт рывка перевернулся стабилизаторами вперёд, что видно по дыму трассера.
Кадры 12-14: ракета продолжает кувыркаться.
Таким образом, раскрытие парашюта происходит примерно за 0.3 секунды. При этом каждый раз был слышен слабый, но отчётливый хлопок.
Старт крупным планом: видео, 280KВ, WMV9

Старт ещё более крупным планом: видео, 280KВ, WMV9

Ракета не получила никаких повреждений и готова к новым стартам. Вот теперь я действительно уверен: магнитный датчик - надёжное средство спасения ракеты! Точнее, я убедился в надёжности своего датчика, ведь вообще магнитные датчики уже давно используются ракетомоделистами и прекрасно себя зарекомендовали.
18.09.2004 Serge77